IQR on simulointijärjestelmä graafisesti suunnittelussa ja valvonnassa laajamittainen hermosolujen malleja.
IQR on keino luoda ja käynnissä simulaatioita laajamittaisten neuroverkot.
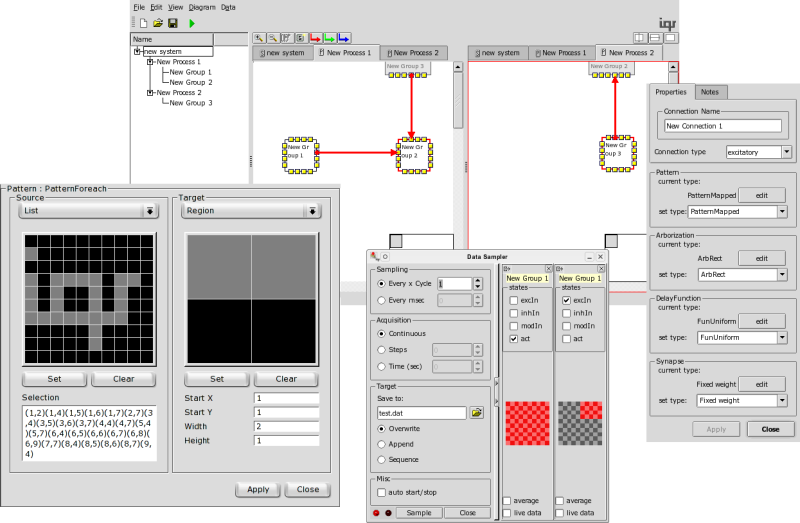
Via IQR n graafinen käyttöliittymä (GUI) käyttäjä voi:
- Suunnitella järjestelmä
- Ohjata toimintaa simulointi
- Muutos mallin parametrien ajon aikana
Koska yhteyden ryhmien välillä neuronien on kulmakivi mallinnus-, IQR tarjoaa joustavan, mutta helppokäyttöinen ja kompakti menetelmiä määritellä monenlaisia liitettävyys kuvioita.
Selain vasemmalla puolella tärkein ikkuna mahdollistaa nopean pääsyn osia mallin. Kaaviot voidaan tulostaa tai tallentaa.
IQR tarjoaa useita välineitä, joilla seurataan ja vuorovaikutuksessa valtioiden mallin elementtejä. Tiedonhankinta sisältää taajuuden ja keston näytteenotto, ja valtiot valituista osioista voidaan tallentaa kautta Data Sampler. Mallit IQR tallennetaan muodossa, joka perustuu XML-standardiin, ja voidaan siten muuntaa monia muita kuvaus kieliopit hermosolujen malleja.
IQR mukana tulee laaja valikoima ennalta määriteltyjä rajapintoja laitteita. Ne sisältävät moduulit hallita Khepera ja Koala robotit (K-Team SA, Lausanne), Lego Mindstorms ja vanhoillinen robotti käytetään AMOTH hankkeeseen. Moduulit voidaan suorittaa synkronoida, tai niiden omaan lanka, joka on riippumaton päivityksen nopeutta tärkein simulointi.
Simulaatioiden IQR ajetaan nopeudella riittää reaaliaikainen valvonta robotteja. Tiedot alla hankittiin AMD Athlon 1GHz, 768MB RAM lineaarisen kynnys neuronien.
Kommentteja ei löytynyt